Al sorprendernos con personas de fuertes capacidades para las matemáticas y el pensamiento lógico, con una memoria enciclopédica o rapidez de aprendizaje, los elogios suelen ir dirigidos a su cerebro. Eso está bien, pero solemos dejar fuera de la lista de la demostración del gran potencial cerebral, si es que tal cosa existe, a algo muy importante: el movimiento. Hoy las máquinas y computadoras que fabricamos superan a los mejores en todas estas facultades mentales; pueden hacer operaciones lógicas y matemáticas con mayor velocidad y precisión que aquellos genios llamados “calculadoras humanas”, manejar y almacenar cantidades inmensas de datos, aprender a gran velocidad y de forma diferente a nosotros –el llamado machine learning–, y hasta han vencido a los campeones mundiales de ajedrez y Go, por poner un ejemplo. Sin embargo, todavía tienen problemas con el movimiento. Aun en el desarrollo tecnológico acelerado de hoy en día, para la gran mayoría de los ordenadores y robots, sortear una simple escalera es un obstáculo importante. Ni hablar de movimientos finos, como recoger una pieza de ajedrez sin tirar las demás, algo que hasta un niño de tres años logra sin demasiado problema. El movimiento fluido y flexible de una mano robótica, por ejemplo, sigue siendo un gran desafío que impulsa la investigación.
Es bueno recordar que el movimiento, al igual que el razonamiento matemático o la memoria, también pasa por el cerebro, donde se planifica y coordina la acción de los más de 600 músculos que tenemos. Quizá debamos empezar a apreciar más los cerebros de los atletas, acróbatas y malabaristas, aunque es posible que no falte mucho para que los robots también nos alcancen en este aspecto.
Imitando a la naturaleza
Que el movimiento de los robots sea un desafío no quiere decir que no haya habido avances ni ejemplos de éxito. Un caso es el famoso ATLAS fabricado por la compañía BostonDynamics de Estados Unidos. Hace un par de años, sorprendieron a todos con videos en los que se ve a ATLAS, un robot de tamaño y proporciones similares al humano, hacer una caminata acompañado por una persona, abrir a su paso puertas sin pestillo, mover cajas de aquí para allá y hasta levantarse solo luego de ser empujado al piso –para evaluar su movimiento, no por maltrato robótico–. Pero ATLAS recién empezaba; este mes difundieron un nuevo video en el que lo muestran trotando a la vez que salta de una plataforma a la siguiente, combinando el movimiento vertical y lateral, tal como haríamos nosotros. Es lo más parecido al parkour robótico que se ha visto hasta ahora.
Los movimientos de ATLAS son continuos y fluidos, y representan un avance tremendo en las dificultadas de movimiento de los robots que se mencionaba al principio. Sin embargo, pese a que ejecuta perfectamente grandes movimientos de desplazamiento, ATLAS todavía no es capaz de realizar movimientos finos y precisos como los que podemos hacer con nuestros dedos. Las manos son una de las cosas más versátiles, complejas y prácticas que tenemos, con un rango gigantesco de posibilidades y adaptación a diferentes tareas, formas de comunicarnos e interactuar con el mundo que nos rodea. Quizá el metal y el plástico no sean suficientes para reproducir la precisión de nuestras manos. Con esto en la cabeza, el investigador Shoji Takeuchi, del Instituto de Ciencia Industrial de la Universidad de Kioto, Japón, optó por recurrir a una nueva rama creciente de la robótica: la robótica biohíbrida.
La disciplina se basa en integrar tejido vivo a dispositivos artificiales para generar sistemas dinámicos. El caso más típico es el de incorporar a robots un tejido muscular generado en el laboratorio con el fin de darle a la máquina la fuerza generadora de movimiento y una funcionalidad más próxima a la de los organismos vivos. Si bien esta aproximación mejoró algunos aspectos, existía una limitación importante: el tejido muscular utilizado comenzaba a encogerse y perdía su función al poco tiempo. Para solucionar este problema Takeuchi volvió a la fuente de inspiración original; no por nada nuestro cuerpo acumula millones de años de evolución.
Sobre la misma articulación existen músculos que al contraerse y acortarse producen movimiento en sentidos opuestos; si ambos se acortaran a la vez, la articulación no se movería. A estos se les llama pares antagónicos. Así, para acercar el mate a la boca, por ejemplo, el bíceps se contrae y el tríceps debe relajarse y estirarse para permitir el movimiento. Para bajar la mano tienen que invertir roles, y el balance entre las fuerzas de cada uno es lo que permite dejar el mate en posiciones intermedias, a la espera de que lo agarre el próximo de la ronda. Takeuchi y su equipo siguieron el ejemplo de la naturaleza, y pasaron de un único músculo a incorporar dos músculos antagónicos a su robot biohíbrido. Este cambio mejoró notablemente el movimiento del autómata y, a la vez, evitó el rápido encogimiento del músculo, logrando que funcionen de forma continua por más de una semana. Su logro y técnica se publicaron hace unos meses en Science Robotics. Esto representa el fin de un obstáculo y un empujón gigante a la robótica biohíbrida.
El taller
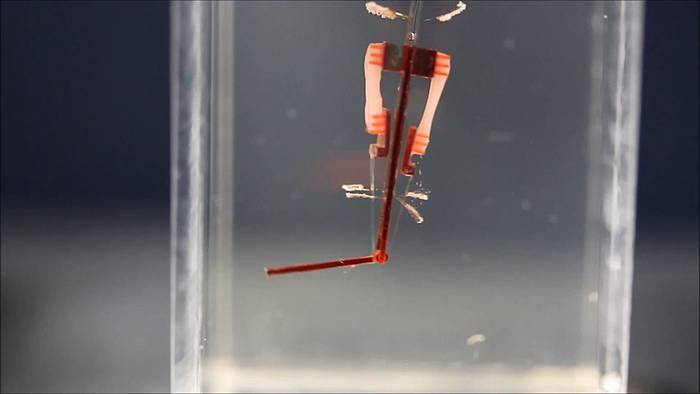
La fabricación de este robot biohíbrido se hizo en dos pasos. El primero consistió en armar el esqueleto robótico, que constó de una única articulación giratoria, electrodos para generar el estímulo que induzca la contracción de los músculos, anclajes para el tejido muscular y cintas flexibles que unían los músculos con la articulación. Es parecido a un dedo, pero con una única articulación, como el pulgar. El segundo paso fue generar los músculos desde cero. Para esto se utilizaron láminas de hidrogel que permiten mantener un ambiente apropiado para las células, y se colocaron allí células llamadas mioblastos, que dan origen a las células musculares. Las láminas tenían franjas marcadas para guiar el crecimiento de los mioblastos y que las fibras musculares queden de forma alineada, como en nuestros músculos.
Takeuchi y su equipo hicieron varias pruebas y observaciones al microscopio, y confirmaron que el tejido muscular de su robot biohíbrido generado en el laboratorio tenía la misma morfología y funcionalidad que nuestros músculos esqueléticos, los que, entre otras cosas, van pegados a los huesos y usamos para movernos. La diferencia es que en lugar de que fueran estimulados por neuronas, los científicos fueron capaces de controlar las contracciones del tejido muscular por medio de cambios en un campo eléctrico generado por los electrodos del robot. Los tejidos musculares del biohíbrido lograron movimientos antagónicos y un funcionamiento similar al sistema músculo-esquelético del cuerpo humano.
Como prueba y demostración, los investigadores hicieron que el robot levantara un pequeño anillo de plástico y lo volviera a dejar donde estaba, algo que hizo sin demasiado problema. Para complejizarlo un poco más, probaron luego usar dos robots iguales al mismo tiempo. Los enfrentaron entre sí y, controlando las contracciones de los músculos de ambos en simultáneo, lograron levantar una ficha cuadrada de plástico con un orificio, tal como levantamos algo de la mesa con el índice y el pulgar. Con estas pruebas comprobaron que los robots biohíbridos tienen el potencial de reproducir varios movimientos naturales de carne y hueso.
De humanos y máquinas
El robot de Takeuchi tiene mucho espacio para mejorar, y aunque el tejido muscular aguantó más de una semana, un récord para los robots biohíbridos, se busca que puedan ser autónomos por períodos más prolongados. Pero aun con sus limitaciones, la importancia del trabajo está en las perspectivas que genera. Como aclaran en su artículo, aunque ellos construyeron sólo dos tejidos musculares en posiciones simétricas en cada robot, el método que utilizaron y describieron permite la construcción de muchos tejidos musculares esqueléticos en cualquier posición que se desee. Es verdad que su robot es bastante simple, en el sentido de que reproduce sólo el movimiento de la punta de un dedo, pero no es más que la primera prueba. Takeuchi y su grupo declaran su convicción de que en el futuro será posible construir estructuras más sofisticadas. Usamos 35 músculos para mover los dedos de la mano; sin duda es una estructura más compleja, aunque no parece un número inalcanzable. Si se combinan los tejidos musculares en la configuración apropiada, los robots biohíbridos podrían finalmente imitar con éxito nuestra habilidad para los movimientos finos y flexibles.
No va a ser mañana, pero son explícitos los esfuerzos por lograr robots, o mejor dicho androides, que sean lo más parecidos posible a los humanos, y hay muchas piezas por ahí: los avances en inteligencia artificial, el movimiento bípedo de ATLAS, y hasta aprendimos cómo acercarnos a los movimientos finos. No es un proceso exclusivo para ingenieros; artistas de todo tipo son reclutados por varias compañías para desarrollar la piel externa de los robots con detalles y rasgos realistas. Algunos ejemplos famosos que se aventuraron en esta línea son los robots Han y Sophia (Hanson Robotics, Hong Kong), Erica (Universidad de Osaka, Japón) y Jia Jia (Universidad de Ciencia y Tecnología de China). Tenemos una tendencia natural al antropomorfismo, aunque cabe preguntarse sobre el interés en crear robots iguales a nosotros.
Algunos argumentos a favor de esa tendencia aluden a facilitar las interacciones entre humanos y androides, a favorecer la accesibilidad de los robots en un ambiente que está moldeado para los humanos, y a permitir la construcción de sistemas experimentales complejos para estudiar las capacidades humanas. Un poco más extremo, David Hanson, fundador de Hanson Robotics, habla de cómo en el futuro puede ser importante no sólo que nosotros nos relacionemos bien con los robots, sino que también ellos se sientan identificados con nosotros. Pero sin divagar demasiado, a medida que construimos sistemas que reproducen y hasta mejoran varias de nuestras características, pensar sobre estos robots nos refleja, como en un espejo, preguntas sobre nosotros mismos y sobre lo que es, o no es, el ser humano. Preguntas viejas si las hay, pero de las que hoy, más que nunca, no viene mal un repaso.
Artículo: “Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues”.
Publicación: Science Robotics (2018).
Autores: Y Morimoto, H Onoe, S Takeuchi.